003 : Self Driving Car
"Self-driving cars are the natural extension of active safety and obviously something we should do." — Elon Musk
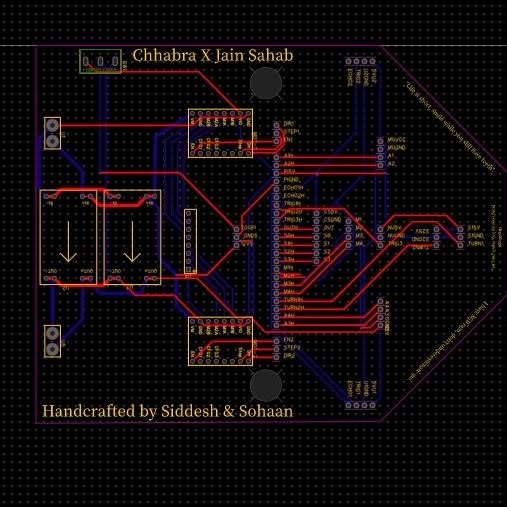
For the WRO Future Engineers competition, I designed and built a self-driving car with my friend. We crafted a custom wooden frame, carefully designing it for optimal weight and dimensions. After spending over a month perfecting the frame’s design, we had it CNC-machined to ensure precision and durability.
The car uses a Raspberry Pi 4 as the core controller, with a camera for real-time vision processing and obstacle detection. I trained a custom dataset using TensorFlow to accurately identify and classify obstacles in the car’s path.
The system also integrates sensors like a gyroscope, accelerometer, and magnetometer for precise localization and navigation. We developed custom code for lane detection, path planning, and autonomous decision-making, enabling the vehicle to operate intelligently and complete tasks without human input.
View Github Repo